Instrucciones de álgebra
Los números
Números complejos
Para definir y operar con números complejos, deberás introducir la unidad imaginaria mediante el icono presente en la sección Símbolos del Menú o utilizando el atajo de teclado Ctrl+J. Fíjate que el número imaginario aparece en color verde, en caso contrario, CalcMe lo interpreta como una variable cualquiera.
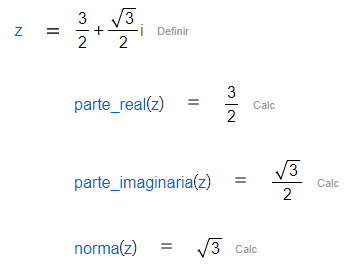
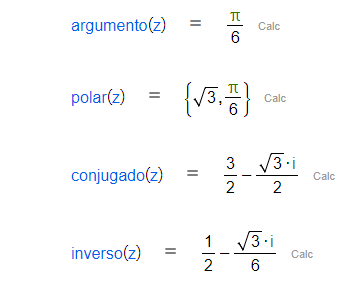
A partir de aquí, puedes escribir de manera natural números complejos en forma binómica y encontrar su parte real e imaginaria, su norma, su argumento, su representación en forma polar, su conjugado y su inverso utilizando los diferentes comandos disponibles.
 |  |
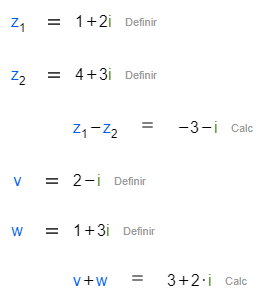
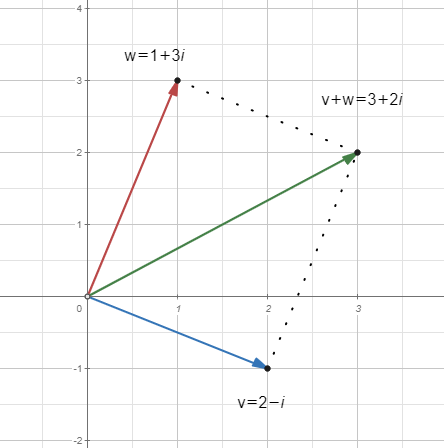
Por otro lado, también puedes operar con estos números, empezando por las operaciones más simples: la suma y la resta. Fíjate que sumar o restar números complejos acaba siendo lo mismo que hacerlo con vectores del plano.
 |  |
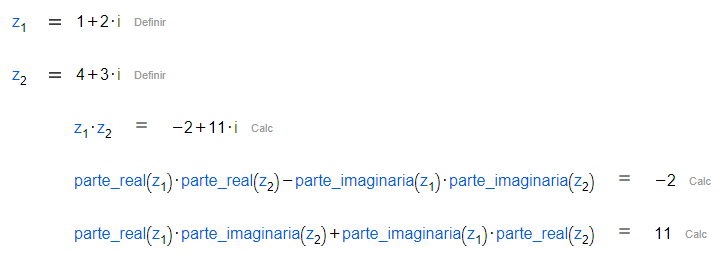
Sin embargo, al multiplicar dos números complejos , debes imaginarte que estás multiplicando dos polinomios y aplicar la propiedad distributiva. Puesto ques, la parte real del producto será el producto de partes reales menos el producto de partes imaginarias . Mientras, la parte imaginaria será la suma de los productos cruzados .
 |
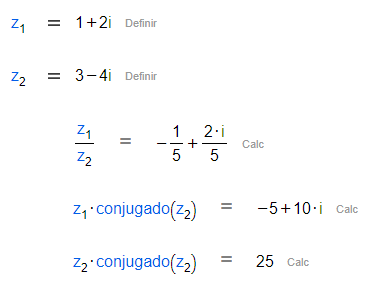
Por último, cuando dividas números complejos, debes eliminar la parte compleja del denominador multiplicando y dividiendo por su conjugado. De este modo, sólo deberás dividir el número complejo del denominador por un valor real.
 |
Elementos de álgebra lineal
Vectores y matrices
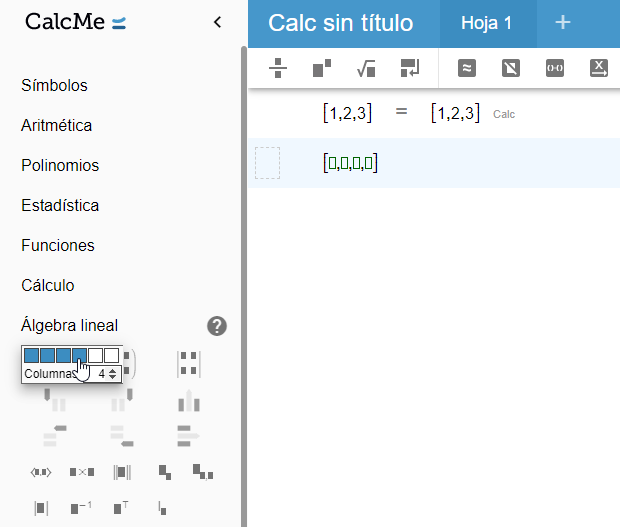
Para empezar a trabajar con elementos propios de álgebra lineal, inicialmente debes ver cómo se definen vectores y matrices en CalcMe. Para definir vectores, puedes hacerlo de tres modos diferentes: mediante el comando vector, utilizando el icono presente en la sección Linear Algebra del Menu, o escribiéndolo manualmente. Las dos últimas son las más habituales.
También puedes definir vectores como variables, realizar operaciones básicas entre ellos y acceder a elementos concretos.
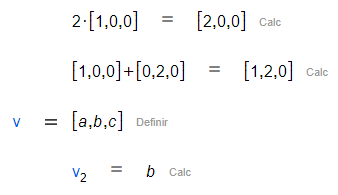 |
Sugerencia
Si quieres ver cómo crear vectores utilizando la función, echa un vistazo a su página dedicada.
Por otro lado, para definir una matriz sólo tienes dos opciones, aunque son más que suficiente. Puedes utilizar el icono que se encuentra al lado del de vectores en Linear Algebra o introducirla manualmente como vector de vectores.
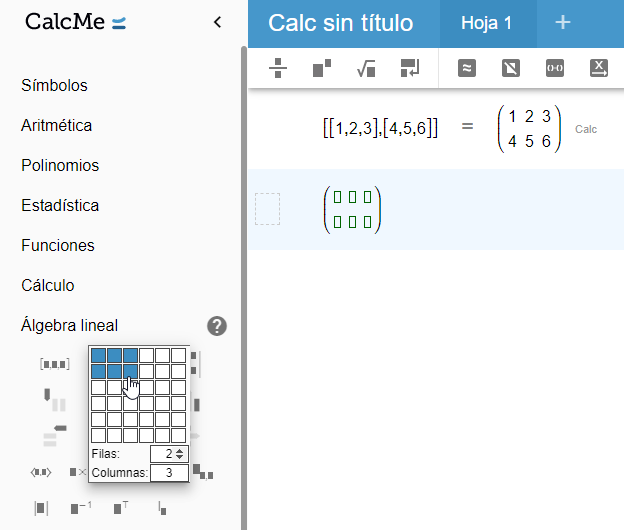
Además, un vez creada la matriz, puedes modificar sus dimensiones insertando o eliminando filas y columnas mediante más iconos presentes en el Menu.
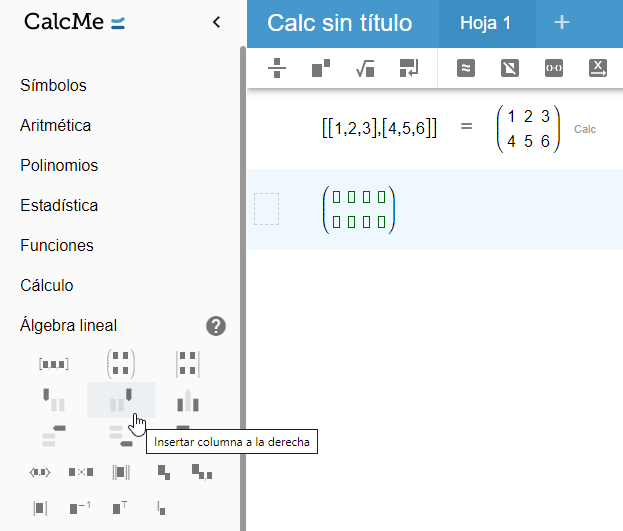
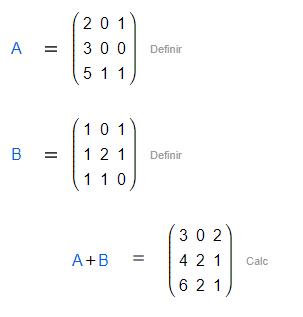
Finalmente, y de forma similar que con los vectores, también puedes realizar operaciones básicas entre matrices y acceder a sus elementos.
 |
Operaciones con matrices
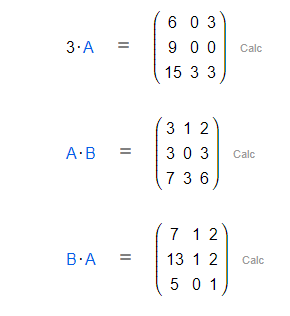
Más allá de las operaciones básicas ya vistas como la suma de matrices o el producto de matrices por escalares, CalcMe te permite realizar un gran abanico de acciones dado un conjunto de matrices. La primera de todas, el producto entre matrices.
 |  |
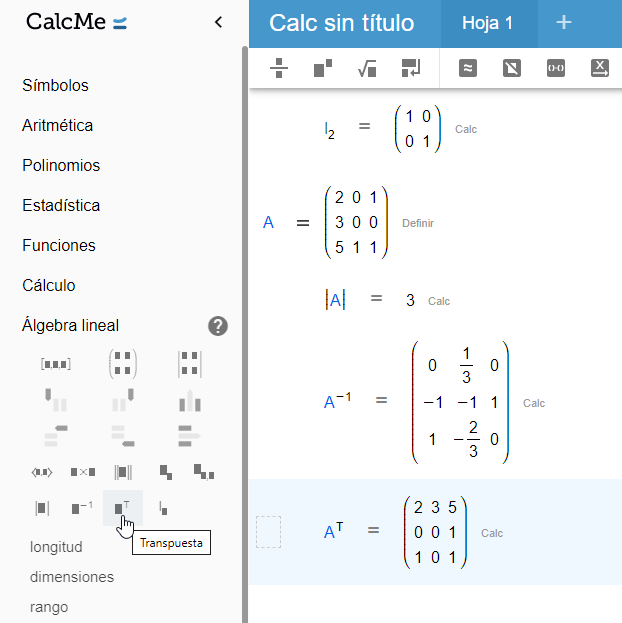
Siguiendo con más operaciones clásicas con matrices, también puedes encontrar comandos en la sección de Algebra lineal del Menu que permiten calcular el determinante, la inversa y la transpuesta de una matriz dada. Del mismo modo, también puedes crear fácilmente una matriz identidad de la dimensión que quieras.
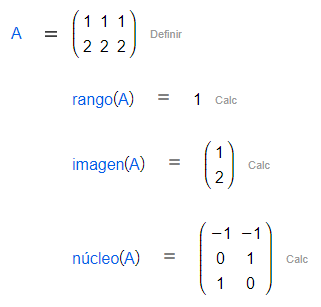
Por último, puedes encontrar el rango, el núcleo y la imagen de una matriz cualquiera utilizando los comandos correspondientes.
 |
Cambio de base
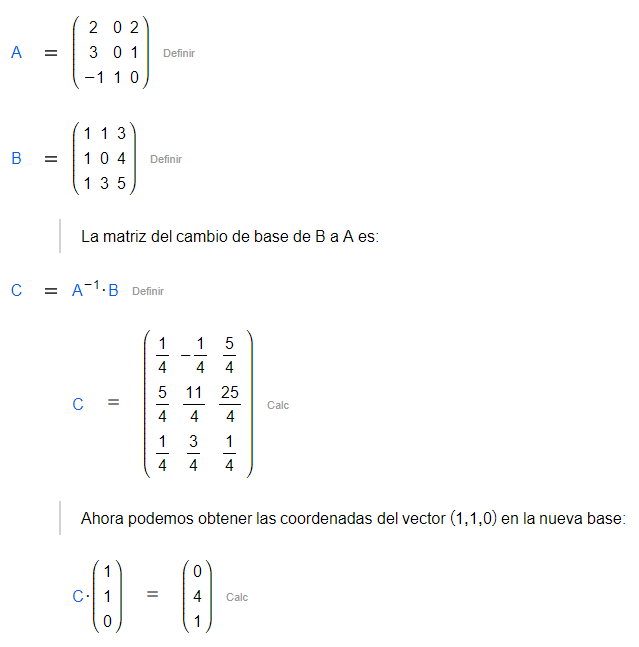
Dadas dos bases de un espacio vectorial , en nuestro caso y , la matriz que tiene por columnas las coordenadas de los vectores de en la base , se llama matriz del cambio de base de a . CalcMe te permite encontrar esta matriz y, en consecuencia, las coordenadas de vectores de en la base .
 |
Ecuación de una recta en el plano y en el espacio
Para crear una recta, es necesario que definas un punto por donde debe pasar y la dirección que seguirá. Con estos ingredientes (aunque no son los únicos posibles) y el comando recta, puedes crear y representar fácilmente una recta en el plano.
 | 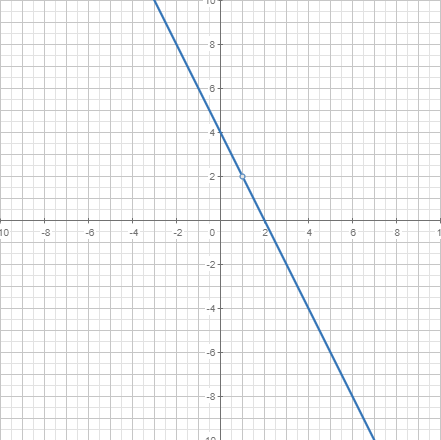 |
Con una sintaxis similar, puedes extender estas acciones al espacio y crear y representar una recta en 3 dimensiones. Fíjate que la recta aparece como intersección de dos planos.
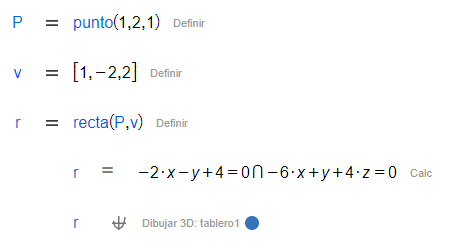 | 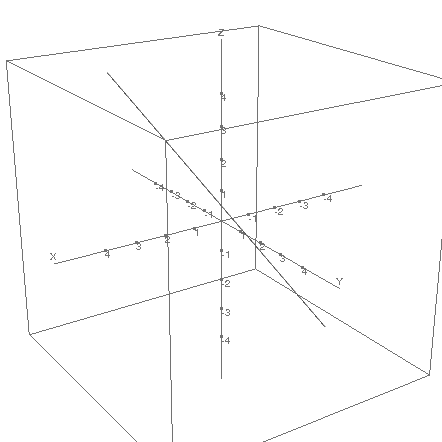 |
Sugerencia
Si quieres ver los diferentes parámetros necesarios para crear una recta, echa un vistazo a su página dedicada.
Ecuación del plano en el espacio
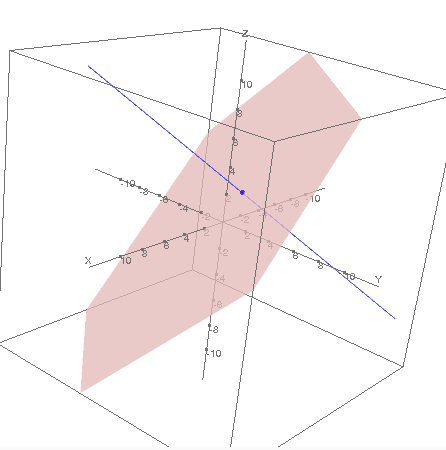
Por otro lado, para crear un plano en el espacio, necesitarás un punto y dos vectores directores. Con estos ingredientes (aunque no son los únicos posibles) y el comando plano, puedes crear y representar fácilmente un plano en el espacio.

Sugerencia
Si quieres ver los diferentes parámetros necesarios para crear una rect plano, echa un vistazo a su página dedicada.
Sistemas de ecuaciones lineales
Solución, solución con grados de libertad
Para resolver sistemas de ecuaciones lineales, determinados y con múltiples soluciones, hay esencialmente dos metodologías: introduciendo las ecuaciones manualmente separándolas con la acción Nueva Línea action (Shift + Enter) o mediante el comando resolver.
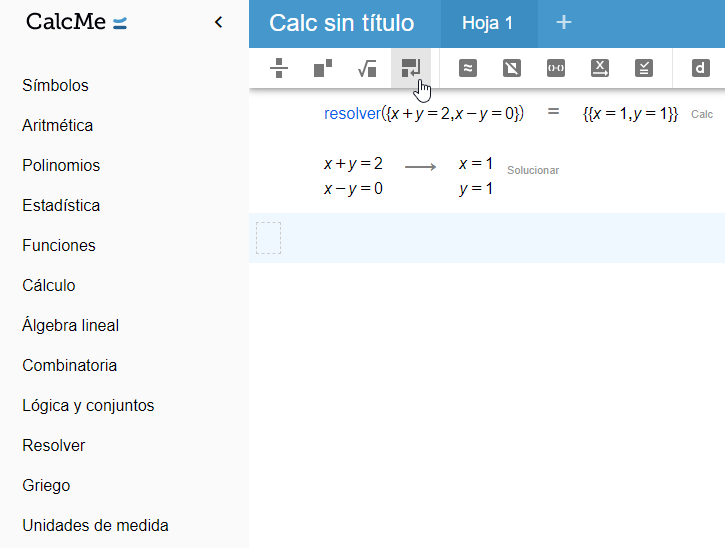
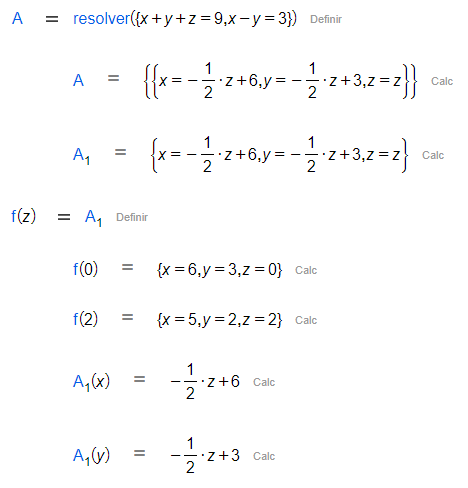
En caso que quieras asignar estas soluciones a una variable, debes tener en cuenta la notación singular que debes utilizar. Además, en el caso de un sistema compatible indeterminado, podrás ver qué valor toma la solución en función de la variable dependiente.
 |
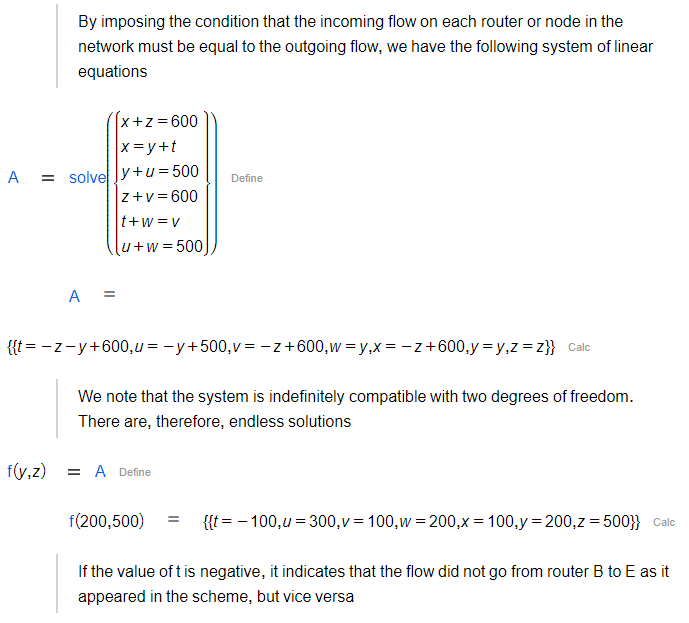
La resolución de sistemas como los vistos anteriormente te abre un abanico de opciones al resolver problemas con distintas incógnitas. Dado el siguiente esquema que muestra el flujo de datos (en MB por hora) entre seis encaminadores () de una red
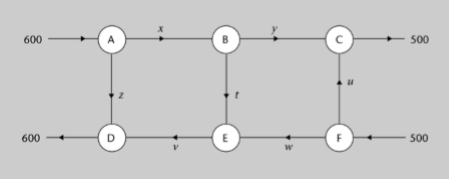 |
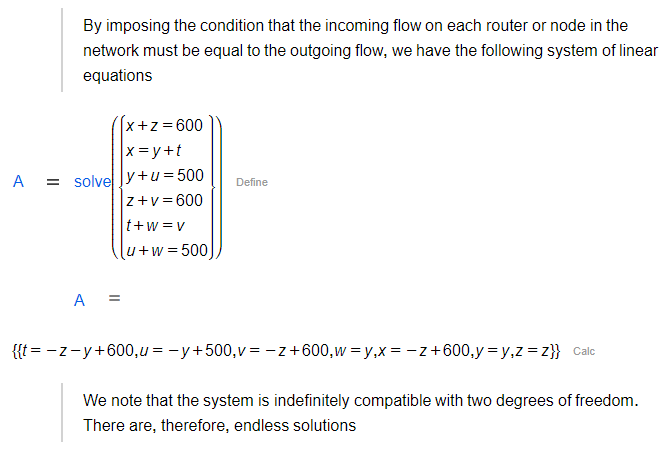
Puedes encontrar el flujo de datos entre cada par de encaminadores directamente enlazados () si tienes en cuenta que el flujo de datos que entra por cada uno de ellos es el mismo que sale. Por otro lado, sabes que el flujo total de datos entrante es de 1100 MB (por y por ) y igual al flujo saliente (por y por ).
 |
Añadiendo un par de condiciones como, por ejemplo, que el flujo de a sea de 200 MB por hora y que el flujo de a sea de 500 MB hora, puedes encontrar una única solución para el sistema de ecuaciones lineales en cuestión.
 |
Intersección de planos
Todos los sistemas lineales vistos anteriormente, se pueden interpretar geométricamente como un conjunto de planos en el espacio que se intersecarán en un punto (sistema compatible determinado), en una recta (sistema compatible indeterminado con un grado de libertad), en un plano (sistema compatible indeterminado con dos grados de libertad) o en ningún punto (sistema incompatible).
Cuando el rango de la matriz de los coeficientes del plano coincida con el rango de la matriz ampliada, los planos se intersecarán en un o más puntos (el conjunto de soluciones del sistema lineal correspondiente). Además, si este rango es el mismo que el número de incógnitas, esta intersección será un único punto.
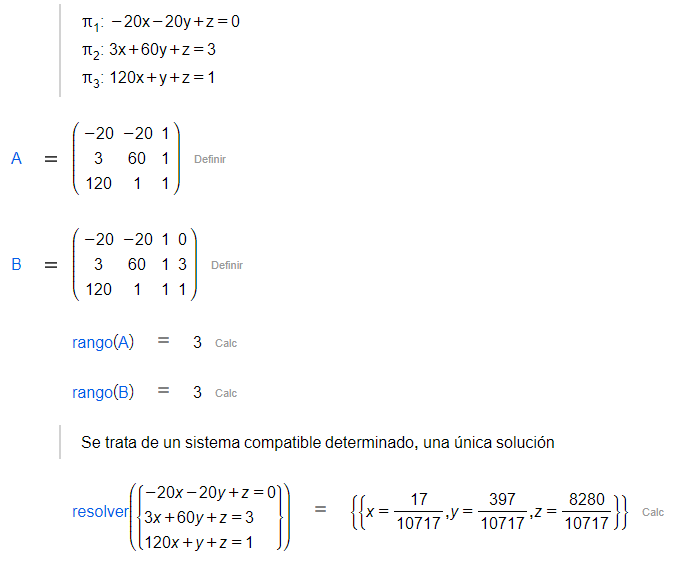 |
Por otro lado, si estos rangos coinciden entre si pero son menores que el número de incógnitas, los planos se intersecarán en un número infinito de puntos. Si el sistema tiene un grado de libertad, se intersecarán en una recta, si tiene dos, en un plano.
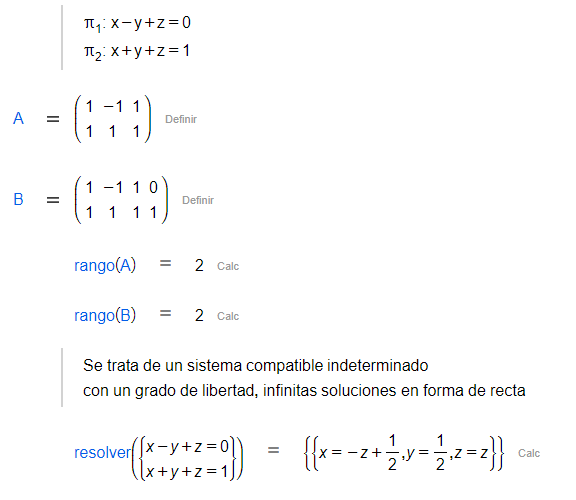 |
Esta situación también se puede dar al considerar más de dos planos. De hecho, hay infinitos que pasen por una recta dada.
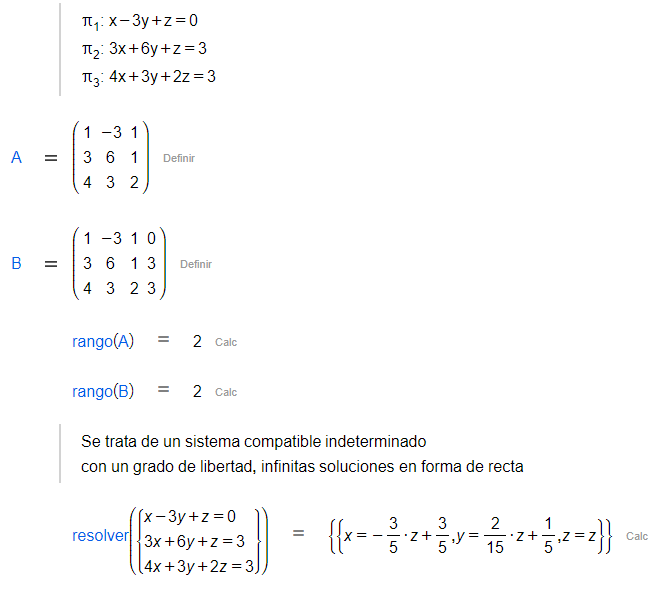 |
Por último, si los planos son paralelos (mismos vectores directores pero diferentes puntos), no existirá ningún punto de intersección y se tratará de un sistema incompatible.
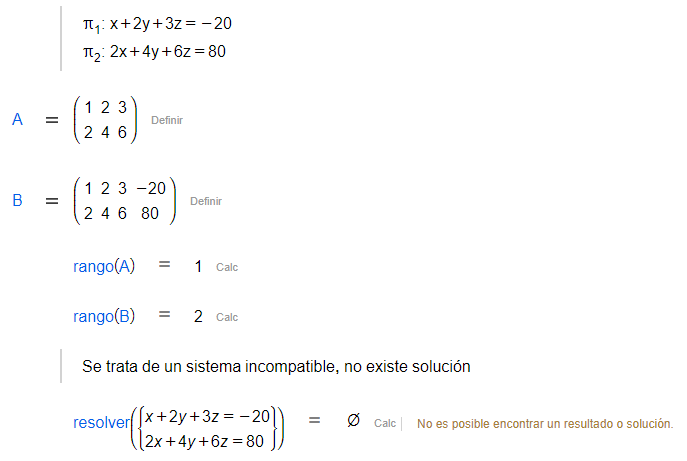 |
Del mismo modo, dados dos planos paralelos, cualquier otro plano que añadamos a la situación podrá intersecarse (o no) con los planos iniciales pero nunca conseguirá que el sistema tenga alguna solución.
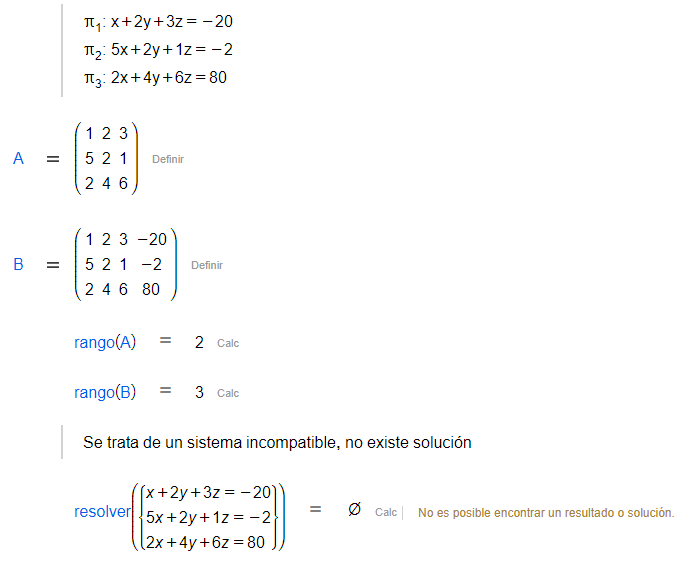 |
Aplicaciones lineales
Dado un endomorfismo cualquiera y su matriz asociada , puedes utilizar los comandos imágen y núcleo para encontrar el conjunto de vectores que son imagen de alguno de los vectores iniciales () y el conjunto de vectores la imagen por es 0 ().
 |
Por otro lado, también puedes encontrar los valores propios y vectores propios correspondientes del endomorfismo utilizando los comandos vaps y veps: Como ya debes saber, se verifica que .
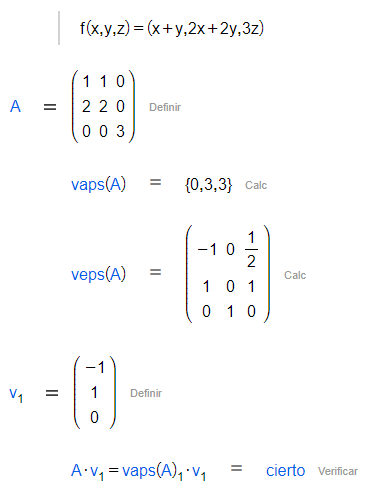 |
Del mismo modo, puedes calcular estos valores y vectores propios mediante el polinomio característico. Una vez calculados, puedes utilizarlo para encontrar la matriz de la aplicación en forma diagonal en la base de vectores propios.
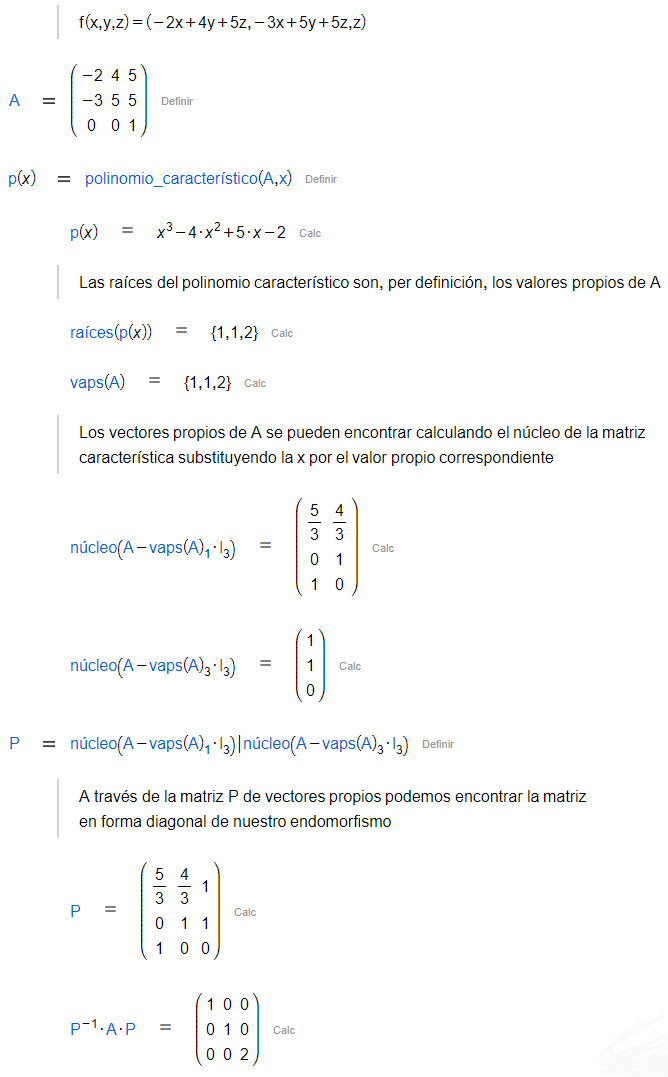 |
Una de las aplicaciones de esta descomposición es encontrar potencias de grado elevado de la matriz inicial. Puesto que , si quieres calcular sólo deberás elevar la matriz diagonal (es decir, los vaps) a la n-ésima potencia y multiplicar por la matriz y por la matriz .
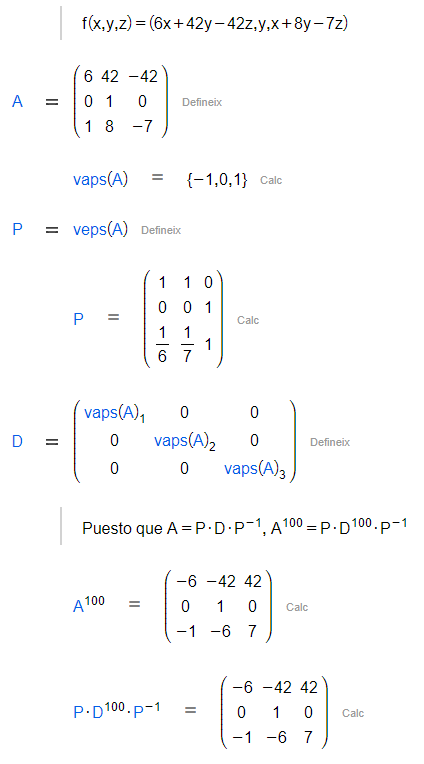 |
Transformaciones geométricas
Traslación
La traslación es una transformación que mueve objetos sin causarles deformación, puesto que cada punto del objeto es trasladado en la misma dirección y a la misma distancia. Para definirla, solo debes establecer la distancia de traslación (tanto en el eje como en el eje ) para definirla.
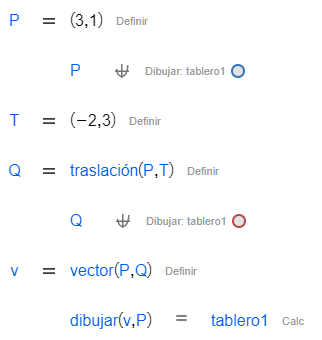 | 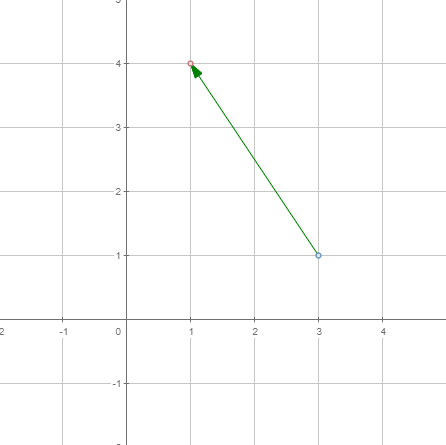 |
De hecho, puedes aplicar esta transformación a objetos más complejos que puntos.
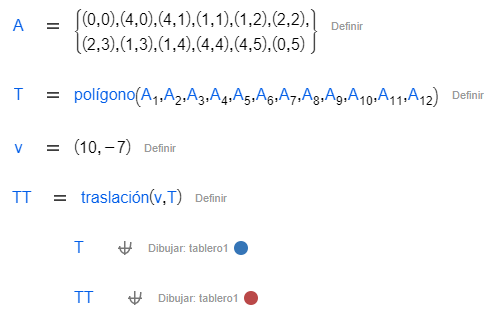 |  |
Rotación
En aplicar una rotación sobre un punto , , la posición de éste se modifica, siguiendo una trayectoria circular en el plano. Para definirla, debes establecer el ángulo de rotación y el punto de rotación o pivote. Si no lo indicas, CalcMe interpretará que el pivote es el origen.
 | 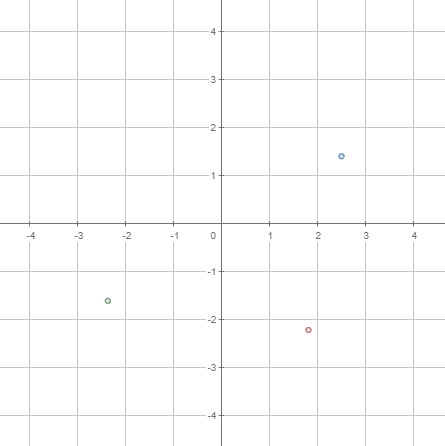 |
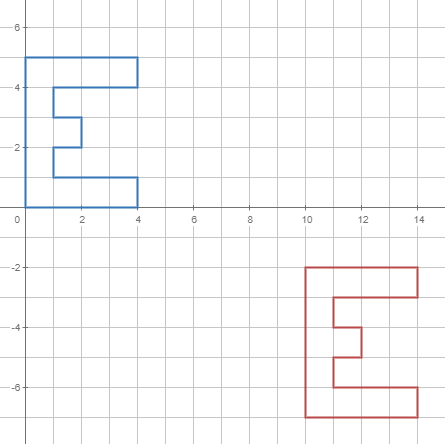
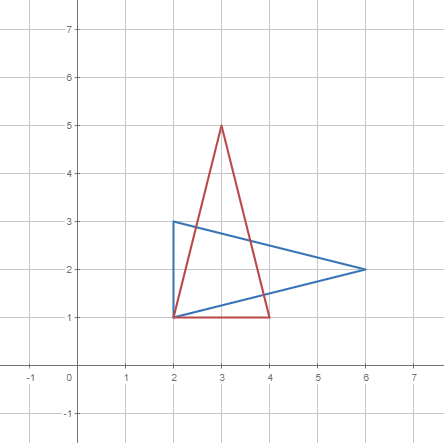
Tal como has visto anteriormente, también puedes aplicar esta transformación a un objeto más complejo.
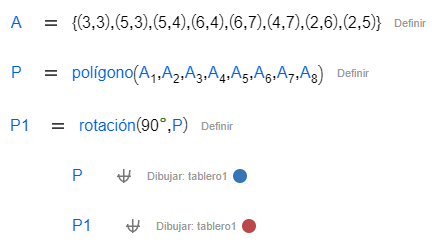 | 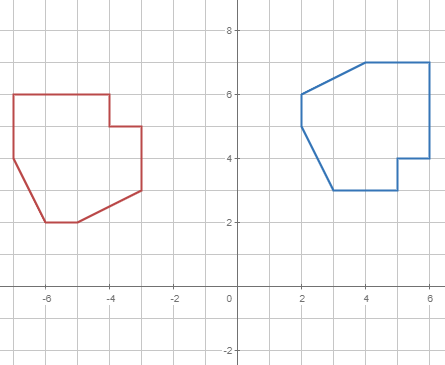 |
O especificando otro punto de rotación diferente del origen.
 |  |
Escalado
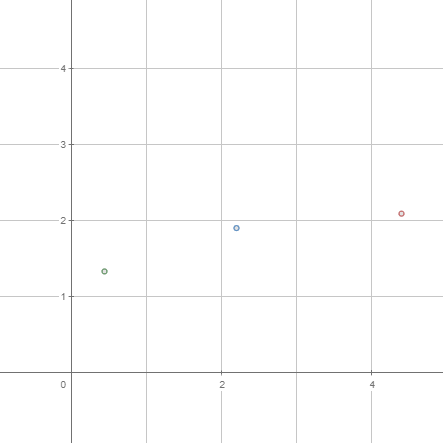
Aplicar un escalado sobre un punto utilizando un punto fijo , implica multiplicar por unos factores dados por las distancias horizontal y vertical entre Y . Si no lo indicas, CalcMe interpretará que el punto es el origen.
 |  |
Tal como has visto anteriormente, también puedes aplicar esta transformación a un objeto más complejo.
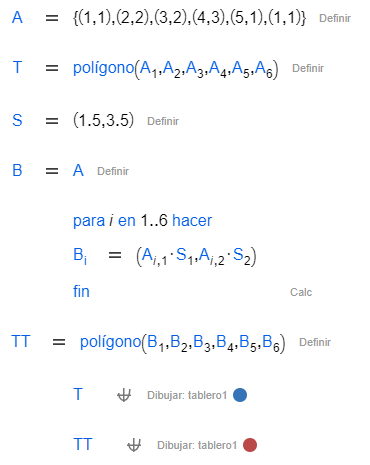 | 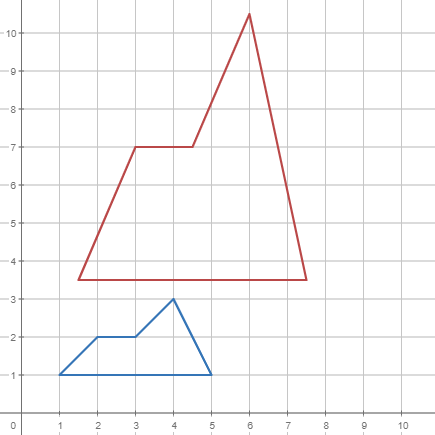 |
O especificando otro punto fijo diferente del origen. En este caso, deberás empezar aplicando una traslación de tal manera que el punto fijo coincida con el origen de coordenadas. Una vez hecho el movimiento, debes aplicar el escalado y, para terminar, deshacer la traslación.
 |  |